全身體動(dòng)作運(yùn)動(dòng)采集分析系統(tǒng)����,18618101725(微信同)����,QQ:736597338 ,信箱slby800@163.com
-
●一套交鑰匙3D動(dòng)作與運(yùn)動(dòng)捕捉、分析系統(tǒng)�,平臺(tái)旨在分析各種動(dòng)作與運(yùn)動(dòng)的所有方面
-
●集各家之長(zhǎng)為我所用:支持并提供廣泛市面上幾乎所有動(dòng)作、運(yùn)動(dòng)硬件
-
●能夠?qū)⒛难芯哭D(zhuǎn)化為您自己的臨床�����、教學(xué)�、人體工程學(xué)或運(yùn)動(dòng)應(yīng)用
-
●全套、完整的多多尺度的生物力學(xué)研究和康復(fù)軟件
-
●根據(jù)需求一站式靈活選配���,滿足各種運(yùn)動(dòng)與動(dòng)作捕捉�����、監(jiān)測(cè)���、分析
-
●提供更加化�����、系統(tǒng)化的運(yùn)動(dòng)動(dòng)作捕獲分析數(shù)據(jù)(包括骨骼��、肌肉�、血管���、神經(jīng)以及外部刺激等)
-
●完整的一站式交鑰匙3D動(dòng)作捕捉分析系統(tǒng):集成所有市面主流動(dòng)作�����、運(yùn)動(dòng)硬件之長(zhǎng)����,系統(tǒng)化的數(shù)據(jù)深挖��、分析、整合�����。
-
●支持從廣泛的硬件(所有市面主流動(dòng)作����、運(yùn)動(dòng)硬件)進(jìn)行實(shí)時(shí)采集。
-
●使用測(cè)力臺(tái)����、手傳感器、EMG�����、眼動(dòng)追蹤���、視頻、EEG�����、虛擬現(xiàn)實(shí)���、觸覺(jué)和模擬數(shù)據(jù)同步采集運(yùn)動(dòng)數(shù)據(jù)�����,簡(jiǎn)化采集和分析���。
-
●通過(guò)原始或處理數(shù)據(jù)的圖形顯示提供即時(shí)回放����。
-
●無(wú)需編程工作——從設(shè)置到數(shù)據(jù)收集再到分析�����,操作可以通過(guò)單選按鈕和下拉菜單完成��。
-
●提供跨各種硬件系統(tǒng)的通用軟件平臺(tái)��,可取各家之長(zhǎng)�����、更高性價(jià)比���。
-
●廣泛的功能和能力的多樣性�����,支持各種應(yīng)用程序�。
-
●市場(chǎng)上的數(shù)據(jù)采集、分析和可視化系統(tǒng)可測(cè)量人體運(yùn)動(dòng)�、動(dòng)作的所有方面。
基礎(chǔ)硬件:motionmonitor可集成各種捕捉硬件的系統(tǒng)裝置及完全同步采集分析多源數(shù)據(jù)的軟件
支持各種捕捉技術(shù):確保技術(shù)性價(jià)比
支持各種外圍設(shè)備:實(shí)現(xiàn)人體動(dòng)作捕捉分析所有方面
一站交鑰匙式服務(wù):避免處理多個(gè)供應(yīng)商的麻煩�,MotionMmonitor支持團(tuán)隊(duì)一鍵式呼叫將解決硬件和軟件相關(guān)問(wèn)題:
典型應(yīng)用簡(jiǎn)介:
1、生物力學(xué)與生命科學(xué)
二���、神經(jīng)科學(xué)與運(yùn)動(dòng)控制
人體運(yùn)動(dòng)源于神經(jīng)����、肌肉和骨骼系統(tǒng)之間的協(xié)調(diào)互動(dòng)���。盡管了解運(yùn)動(dòng)神經(jīng)肌肉和肌肉骨骼功能的潛在機(jī)制����,但目前還沒(méi)有對(duì)復(fù)合神經(jīng)肌肉骨骼系統(tǒng)中神經(jīng)機(jī)械相互作用的相關(guān)實(shí)驗(yàn)理解�����。這是理解人類運(yùn)動(dòng)的主要挑戰(zhàn)����。
為了解決這個(gè)問(wèn)題,MotionMonitor開發(fā)了綜合多尺度建模平臺(tái)�����,包括肌肉�、骨骼和神經(jīng)模型等等。我們使用**的高密度肌電圖 (HD-EMG) 與盲源分離相結(jié)合����,將干擾 HD-EMG 信號(hào)識(shí)別到由同時(shí)控制許多肌肉纖維的脊髓運(yùn)動(dòng)神經(jīng)元放電的尖峰列車集合中。我們開發(fā)了由體內(nèi)運(yùn)動(dòng)神經(jīng)元放電驅(qū)動(dòng)的多尺度肌肉骨骼建模公式����,用于計(jì)算所得肌肉骨骼力的高保真估計(jì)。這將使神經(jīng)控制的肌肉組織如何與骨骼組織相互作用的分析能力qian所未有�����,因此將為了解神經(jīng)肌肉/骨科ji病的病因�����、診斷和治liao開辟新的途徑。
神經(jīng)科學(xué)和運(yùn)動(dòng)控制的研究受益于內(nèi)置于我們方案的各種硬件和分析�。
使用任何 Tobii 頭戴式眼動(dòng)追蹤系統(tǒng)來(lái)捕捉與其他數(shù)據(jù)同步的實(shí)時(shí) 3D 眼動(dòng)數(shù)據(jù)。分析視線交叉點(diǎn)����。
使用 Biosemi 或 AntNeuro 硬件捕獲 EEG 數(shù)據(jù)。適用于坐姿�����、站立和活躍的任務(wù)�����。根據(jù)其他運(yùn)動(dòng)學(xué)數(shù)據(jù)在 EEG 數(shù)據(jù)中創(chuàng)建用戶定義的興趣點(diǎn)����。
實(shí)時(shí)呈現(xiàn)視覺(jué)、聽覺(jué)和觸覺(jué)提示��?��?梢允褂煤?jiǎn)單的幾何形狀����、條形圖或時(shí)間序列圖或特定于應(yīng)用程序的視覺(jué)效果(如紅綠燈)以多種方式呈現(xiàn)用戶定義的視覺(jué)提示��。
使用 監(jiān)視器r 與 Unity 和 World Viz 的雙向通信將視覺(jué)反饋擴(kuò)展到虛擬現(xiàn)實(shí)����。 3D 可視化可以以多種方式呈現(xiàn)。一些例子包括:
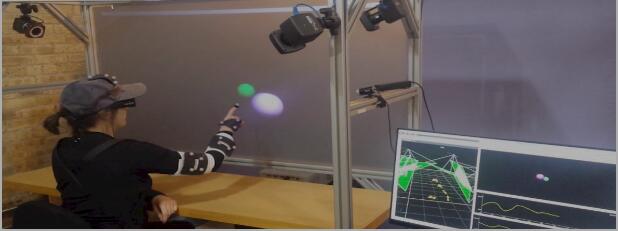
手部實(shí)驗(yàn)室:專為上肢研究設(shè)計(jì)的立體屏幕和桁架系統(tǒng)���。為主體提供與屏幕上或屏幕前呈現(xiàn)的 3D 虛擬對(duì)象進(jìn)行交互的能力����。
沉浸式顯示器:一個(gè)完整的硬件和軟件解決方案���,當(dāng)手臂的可視化被隱藏或擾動(dòng)時(shí)�,使用同位半鏡屏幕進(jìn)行研究��。
綜合研究環(huán)境系統(tǒng) (IRES):與 Bertec 合作創(chuàng)建的研究質(zhì)量環(huán)境����。配備帶 3D 動(dòng)作捕捉系統(tǒng)和儀表跑步機(jī)的沉浸式 VR 圓頂。
動(dòng)作捕捉技術(shù)
1.2.1步態(tài)分析的技術(shù)分類
反光標(biāo)記點(diǎn)既不會(huì)接收無(wú)線信號(hào)也不會(huì)向外發(fā)射任何無(wú)線信號(hào)��,它的表面涂抹了一種特殊熒光材料�,可以很好地讓紅外攝像頭識(shí)別到并反射回高質(zhì)量的圖像信號(hào)�����。
紅外攝像頭一般采用RJ45接口�����,通過(guò)網(wǎng)線連接匯聚到交換機(jī)���,再由交換機(jī)統(tǒng)一將數(shù)據(jù)轉(zhuǎn)發(fā)到計(jì)算機(jī)。
目前市面上生產(chǎn)紅外攝像頭的光學(xué)步態(tài)捕捉的公司有英國(guó)的Vicon公司���、美國(guó)NaturalPoint公司�、美國(guó)MotionAnalysis公司���、中國(guó)的青瞳視覺(jué)公司等��。NaturalPoint公司生產(chǎn)的Optitrack系統(tǒng)如圖1-5所示����。
基本原理是首先找到圖像中移動(dòng)的物體�,然后會(huì)對(duì)移動(dòng)的物體進(jìn)行深度評(píng)估,識(shí)別出人體的部位����,然后將其從背景環(huán)境中分割出來(lái)���。分割之后要做的工作就是模式匹配�����,將其匹配到骨骼系統(tǒng)上���。算法流程如圖1-7所示�����。
以上三種方案的3D深度攝像頭方案大部分用在娛樂(lè)級(jí)別方面���,比如臉部識(shí)別解鎖、人機(jī)互動(dòng)��,且由于其探測(cè)距離較近���,很難用在大空間上���。目前基于3D深度攝像頭的芯片在不斷地研究改進(jìn)中��。其硬件芯片仍是目前的難點(diǎn)�,再其次是算法的復(fù)雜度�,大量的圖像計(jì)算對(duì)硬件的主控芯片的計(jì)算能力有較高的要求,在功耗上很難做到低功耗的工作����,受制于目前的電池技術(shù),單個(gè)傳感器的工作時(shí)間比較短����。其優(yōu)勢(shì)在于不需要用戶穿戴任何傳感器和粘貼標(biāo)記點(diǎn)。利用Kinect進(jìn)行人體下肢骨架識(shí)別如圖1-8所示�����。
1.2.1.3基于2D攝像頭的動(dòng)作捕捉
1.2.1.4基于MEMS慣性傳感器的慣性動(dòng)作捕捉系統(tǒng)
基于MEMS慣性傳感器的動(dòng)作捕捉系統(tǒng)在各個(gè)領(lǐng)域都有應(yīng)用����,包括虛擬現(xiàn)實(shí)[7]、運(yùn)動(dòng)訓(xùn)練[8]�、生物醫(yī)學(xué)工程[9]和康復(fù)[10][11]。因?yàn)樗鼈凅w積小�����、重量輕、價(jià)格合理[12][13][14]�。
慣性動(dòng)作捕捉系統(tǒng)主要是將慣性傳感器綁定在人身體主要骨骼上,如足����、小腿、大腿�����,實(shí)時(shí)測(cè)量出每段骨骼的旋轉(zhuǎn)��,利用正向運(yùn)動(dòng)學(xué)(Forward kinematics���,F(xiàn)K)和反向運(yùn)動(dòng)學(xué)(Inverse kinematics,IK)實(shí)時(shí)推導(dǎo)計(jì)算出整個(gè)人身體的運(yùn)動(dòng)參數(shù)��。慣性動(dòng)作捕捉系統(tǒng)的優(yōu)勢(shì)在于他是一種無(wú)源的動(dòng)作捕捉系統(tǒng)�,不需要借助任何外部信息,即不受外界環(huán)境的干擾����。缺點(diǎn)則是由于慣性傳感器普遍存在累計(jì)漂移會(huì)使慣性系統(tǒng)無(wú)法測(cè)量出運(yùn)動(dòng)的位移。其全身穿戴效果如圖1-10所示���。
機(jī)械式動(dòng)作捕捉依靠穿戴在人身體的機(jī)械裝置來(lái)測(cè)量關(guān)節(jié)角度以及位移���。人體運(yùn)動(dòng)帶動(dòng)機(jī)械裝置的運(yùn)動(dòng)�����,從機(jī)械裝置上的角度傳感器可以知道運(yùn)動(dòng)角度��,根據(jù)角度和機(jī)械部位的長(zhǎng)度從而計(jì)算出移動(dòng)位移����。這一技術(shù)早出現(xiàn)在20世紀(jì)���,由于機(jī)械結(jié)構(gòu)的笨重�����,在步態(tài)分析方面機(jī)械動(dòng)作捕捉早已退出發(fā)展的主流�����。但利用機(jī)械外骨骼的搬運(yùn)發(fā)展成了主流�����。其形狀如圖1-12所示����。
其他的技術(shù)路線還有基于聲學(xué)式的動(dòng)作捕捉,基于電磁式的動(dòng)作捕捉等���。